
In this edition of THIS VS. THAT, we’ll cover active torque-vectoring systems — specifically brake-based systems vs. active differentials. What’s torque vectoring, you ask? Torque vectoring usually refers to the ability to actively control how an engine’s power is distributed between a vehicle’s wheels (typically between two wheels on the same axle), in order to help improve vehicle performance in corners.
But how torque is vectored makes a big difference, and it’s the reason why we’re covering this topic.
This brings us to brake-based vs. active differential torque vectoring. These systems are specifically designed to help a car while cornering and are active systems (I like to say proactive). They both do this by monitoring a vehicle’s behavior (using lateral g, yaw sensors, etc.) and the driver’s inputs (steering, gas, etc.) and can begin routing torque before wheels begin slipping to actively enhance cornering performance. So what’s the difference between the two?
BRAKE-BASED TORQUE VECTORING

Here’s an illustration of how brake-vectoring works. The brakes are activated (highlighted in green) to slow the right side of the car to help the car turn right.
As you might have guessed, brake-based torque vectoring (or brake-vectoring, as some manufacturers refer to it) uses a vehicle’s brakes to vector torque. This is essentially a poor man’s version of torque vectoring. So let’s say you’re coming up on a corner about to turn right. In this situation, a brake-based torque vectoring system would apply brakes to the inside wheel (or wheels) on the right side of the car. This has the effect of making the left wheels turn faster, making the car turn in more sharply to the right (fun!).
To better understand how this works, think about reaching out your right arm to grab onto a pole as you swing around it. By grabbing the pole with your right arm you’re effectively slowing down the right side of your body, causing you to turn right. A tank works the same way, where slowing down the right side track causes the tank to turn right. Makes sense, right?
So cars equipped with brake-vectoring can provide noticeably sharper turn-in. In addition, brake-based torque vectoring is also effective in off-throttle situations, meaning the system still works even if you’re not applying the throttle in turns. You see, many torque-vectoring differentials cannot vector torque unless you’re pressing the gas, so it’s one advantage brake vectoring has over some active torque-vectoring differentials.
However, because I constantly see errors in regards to Acura’s SH-AWD system (and it drives me crazy), please note the following: the first gen SH-AWD beginning with the 2005 RL does work even when throttle is not applied (this version of SH-AWD can send engine braking to the outside rear wheel in turns to reduce lift-throttle-oversteer situations). There, I’ve finally gotten that off my chest.
While this all sounds wonderful, there are some obvious disadvantages to brake-vectoring. Since you’re using your brakes more often, it can wear out your brakes faster. Also, if you’re driving aggressively, it can only further add to heat build-up in your brakes, lengthening your stopping distances and also decreasing the level of torque vectoring. Finally, having your car apply its brakes while you’re simultaneously trying to apply the gas probably isn’t the best — or fastest — way to get around a corner.
Example of companies that use brake-vectoring:
Acura, Audi, BMW, Honda, Mitsubishi, Nissan, Subaru Volkwagen and many others
TORQUE-VECTOING DIFFERENTIALS
Torque-vectoring differentials (TVDs) are one of the biggest advancements to improve vehicle handling dynamics in the 21st century. Compared to an open (passive) differential, a torque-vectoring differential can actively regulate torque distribution between a vehicle’s wheels (typically rear) to significantly improve cornering performance. It does all of this without using your car’s pesky brakes.
By sending more power to the outside rear wheel in turns, a torque-vectoring differential can generate more turning force (yaw), and essentially uses the rear wheels to help steer the vehicle. Pretty cool, right?
Most TVDs use two multi-plate clutches in the rear differential. Some are hydraulic while others are electromagnetic. Some have planetary gearsets (to accelerate the outside wheel) while others do not. But one thing that virtually all TVDs can do is send a majority of the vehicle’s torque to one wheel, which makes a noticeable difference when cornering. Examples of this are in BMW’s X5 and X6 M series SUVs. Oddly, this diff can’t be found in any other BMW vehicle. I can imagine the 3 series lead engineer asking, “Can I has a torque-vectoring differential, bitte?” and the BMW bigwigs replying “Nein!”
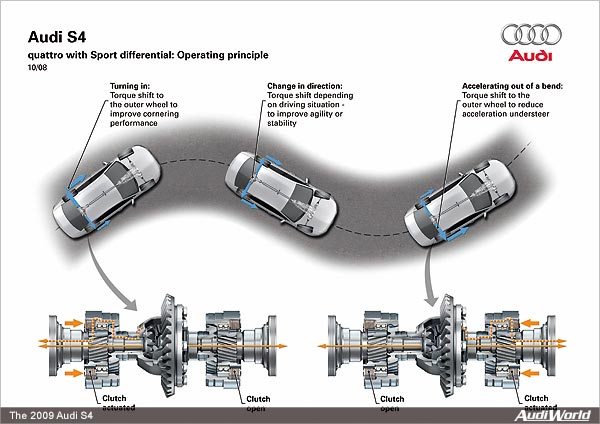
Other systems go one step further. Acura’s SH-AWD was the first AWD system to not only send power proactively front to rear and side to side at the rear wheels, but it could also accelerate the outside rear wheel even faster to generate more turning force (5.6% on the 2005 RL, 1.7% on 2007 and up MDX, RDX, TL SH-AWD and 2.7% on the TLX). Audi’s sport differential (available on all S and RS models) can accelerate the outside rear wheel up to 10% faster.
So how effective are TVDs? Well, it’s so effective that I lost all sanity and ended up buying a 2009 Acura TL SH-AWD (yes, the beaky one in which 97.8% of people in focus groups ran screaming out of the room because they thought it was a Transformer that was trying to eat them). But here’s why: I worked on the launch of that car, and had the chance to drive it against all of its competitors on a track (BMW 335i, Infiniti G35, Lexus IS350, etc.). And you know what? There wasn’t a car that could touch it on the track.
In fact, Edmunds tested a TL SH-AWD against a BMW 335i (rear-wheel drive) and 335xi (all-wheel drive), in addition to a couple other competitors. Guess what? The TL SH-AWD was 2 seconds faster on the track than the next closest car (in case you weren’t aware, that’s a huge difference).
http://www.edmunds.com/acura/tl/2010/road-test-3/
When Road and Track tested it (along with a later generation S4), they found that these two cars (which were the heaviest in the test) were also the fastest around the track. Was it any coincidence that both of these cars also had torque-vectoring differentials?
Still not convinced? How about the fact that the 2007 Acura MDX (a 4500 lb SUV) with SH-AWD had a lateral g rating of between 0.86 g – 0.88 g, depending on who was testing it. For reference, this was pretty much identical to the original NSX and was on par with the BMW M3 and M6 at the time. Mind you, the MDX did this on mud/snow all-season SUV tires, not summer tires like the BMWs had.
So what are the disadvantages of a torque-vectoring active differential? Well, some systems do not work off-throttle (and this is where that brake-based torque vectoring comes in handy). And, of course, the cost of adding on a torque vectoring differential is usually around $1000 or more depending on which manufacturer you go with. But you know that saying about getting what you pay for…
Example of companies that use torque-vectoring differentials:
Acura, Audi, BMW, Honda, Mitsubishi, Nissan, Subaru and several others
Example of companies that use torque-vectoring differentials with outside wheel acceleration:
Acura, Audi, and a few others
SUMMARY
So in the end, both brake-based systems and active differentials will improve your vehicle’s performance. But if you really want the one that’s going to kick your car’s performance into high gear, get the torque-vectoring differential, especially if you do autocross or track driving like I do.
As stated above, there are some manufacturers that offer both brake-vectoring and TVDs on the same vehicle. Of course, if you really want to go all out, get a system that also has outside wheel acceleration in addition to torque vectoring. You’ll thank me every time you take your car on the track — or that freeway onramp.

THANK YOU for being one of the only people I have encountered who actually knows that Acura’s torque vectoring works off throttle!!!! I was soooo annoyed by claims by other manufacturers that implied that this was not the case. Ahhh I can sleep well now…
LikeLiked by 1 person
Hi Ken! Thanks for reading and for your comment! Yes, most people (and manufacturers) did not know that SH-AWD could do this. I actually had a chance to speak with an Acura engineer recently, and he mentioned that the new TLX has a 2nd gen SH-AWD system that can also send positive torque to the INSIDE rear wheel during a high-speed lane change to help prevent the car from rotating (something you see a lot when cars do an avoidance maneuver on the highway and lose control). Those Acura engineers are pretty damn savvy.
LikeLike